|
I'm thrilled about a career transition as I am flipping a new chapter to join the Department of Computer Science at Texas State University as an Assistant Professor of Instruction, focusing on teaching and education to inspire and mentor the next generation of computer scientists and roboticists. I have a deep passion for robotics and artificial intelligence, with particular interests in robot task and motion planning, vision-based manipulation, multi-robot systems, deep learning, and computer vision. Over the years, I have gained extensive industry experience as a Robotics Software Engineer, pushing the boundaries of humanoid robots and embodied AI for logistics applications at Apptronik , and revolutionizing intelligent robotics system to facilitate medical staff in hospitals at Diligent Robotics . I also had a wonderful internship at Autodesk where I provided motion planing solutions for CNC machine tending applications. I obtained my Ph.D. from Rutgers University. I was fortunate to be advised by Prof. Kostas Bekris . My research interests lie in the field of robot planning, vision-based manipulation, as well as multi-robot system. Email / CV / Google Scholar / GitHub / LinkedIn / |

|
|
[08/2025] I joined the Department of Computer Science at Texas State University as an Assistant Professor of Instruction. [12/2024] I joined Apptronik as a Senior Robotics Software Engineer. [11/2022] I joined Diligent Robotics as a Robotics Software Engineer. [10/2022] I defended my Ph.D. thesis and graduate from Rutgers University. [07/2022] One paper has been accepted to ISRR 2022. [05/2022] I will start my robotics research internship at Autodesk in summer 2022. [05/2022] I receive ICAPS 2022 Student Scholarship. [04/2022] One paper has been selected for ICRA 2022 as Outstanding Manipulation Paper Finalist. [02/2022] One paper has been accepted to ICAPS 2022. [01/2022] Three papers have been accepted to ICRA 2022. [02/2021] One paper has been accepted to ICRA 2021. [02/2021] I write a book chapter for the book "Resilience in the Digital Age". |
|
|
|
Yinglong Miao, Rui Wang and Kostas E. Bekris The International Symposium on Robotics Research (ISRR), 2022 paper This work formulates the general, occlusion-aware manipulation task without access to object models, and focuses on safe object reconstruction in a confined space with in-place relocation. |
|
Rui Wang, Kai Gao, Jingjin Yu and Kostas E. Bekris International Conference on Automated Planning and Scheduling (ICAPS), 2022 paper / code This work proposes a lazy evaluation framework for solving object rearrangement in confined spaces, which effectively reduces the number of computationally expensive motion planning and collision checking calls to achieve significant improvement on efficiency and scalability. |
|
Rui Wang, Yinglong Miao and Kostas E. Bekris IEEE International Conference on Robotics and Automation (ICRA), 2022 paper / code This work proposes an efficient constraint informed monotone solver, a high-quality global task planner as well as an effective pre-processing labeled roadmap to significantly improve the solutions for object rearrangement in cluttered and confined spaces such as shelves. |
|
Shiyang Lu, Rui Wang, Yinglong Miao, Chaitanya Mitash and Kostas E. Bekris IEEE International Conference on Robotics and Automation (ICRA), 2022 paper / code This work proposes a robotic system for picking and constrained placement of novel objects, which keeps learning object features and updates their reconstructed models to enhance manipulation efficiency. |
|
Ewerton R. Vieira, Daniel Nakhimovich, Kai Gao, Rui Wang, Jingjin Yu and Kostas E. Bekris IEEE International Conference on Robotics and Automation (ICRA), 2022 paper This work explores the use of topological tools - persistent Homology for achieving effective non-prehensile manipulation in cluttered and constrained workspaces. |
|
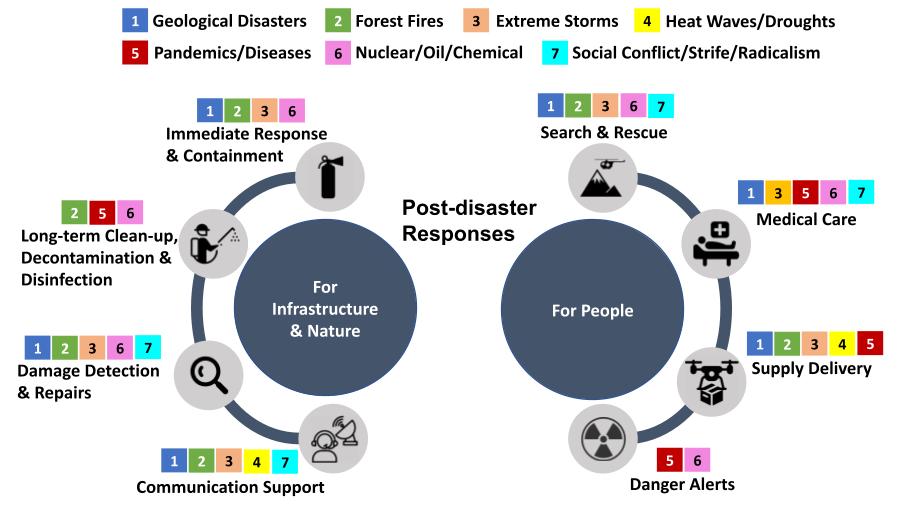
Rui Wang, Daniel Nakhimovich, Fred S. Roberts and Kostas E. Bekris Lecture Notes in Computer Science book series (LNCS, volume 12660), Springer, 2021 paper This work discusses the roles robotics can play towards providing resiliency to disasters in terms of pre-emptive measures and post-disaster responses. |
|
Rui Wang*, Kai Gao*, Daniel Nakhimovich*, Jingjin Yu, Kostas E Bekris IEEE International Conference on Robotics and Automation (ICRA), 2021 paper This work introduces a framemwork with a compact region graph, an efficient monotone solver and an effective informed search structure to solve uniform object rearrangement problems. |
|
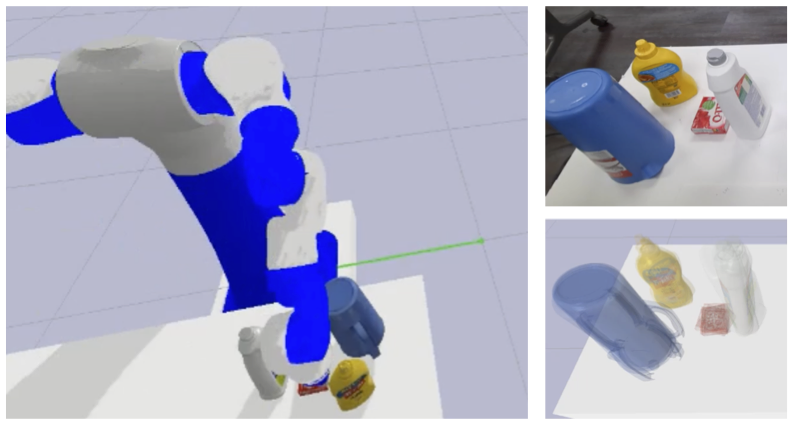
Rui Wang, Chaitanya Mitash, Shiyang Lu, Daniel Boehm, Kostas E. Bekris IEEE International Conference on Intelligent Robots and Systems (IROS), 2020 paper This work proposes a perception and a motion planning pipeline which computes safe picking paths under object uncertainty which achieve minimum collision probability and maximum success likelihood. |
|
(Reviewer) IEEE Transactions on Robotics (T-RO) (Reviewer) Robotics: Science and Systems (RSS) (Reviewer) IEEE International Conference on Robotics and Automation (ICRA) (Reviewer) IEEE International Conference on Intelligent Robots and Systems (IROS) (Reviewer) Conference on Robot Learning (CoRL) (Reviewer) International Workshop on the Algorithmic Foundations of Robotics (WAFR) (Reviewer) IEEE Transactions on Industrial Electronics (TIE) |